Electrical and Computer Engineering
Cal Poly Pomona banshee UAV
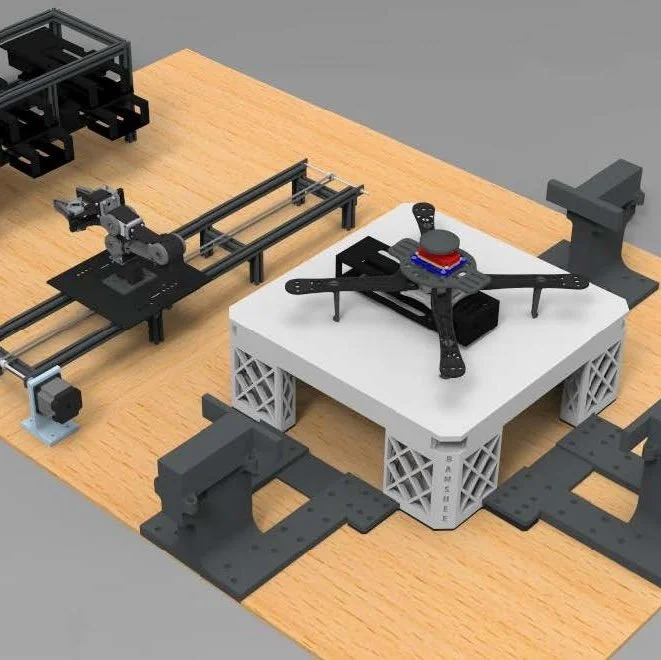
I created a detailed power sheet to track voltage and current requirements across BANSHEE’s autonomous drone battery swapping station, helping ensure safe integration of high-voltage subsystems. My primary focus was verifying the charging system, including constant current modules and battery management systems (BMS). Since the station runs on a 48V/100A battery, each component—from charging circuits to control electronics—had to be individually tested before full system integration. My work helped validate power flow, subsystem stability, and charging reliability under real-world operating conditions.t.
Embedded Systems – Firmware & System Verilog Development
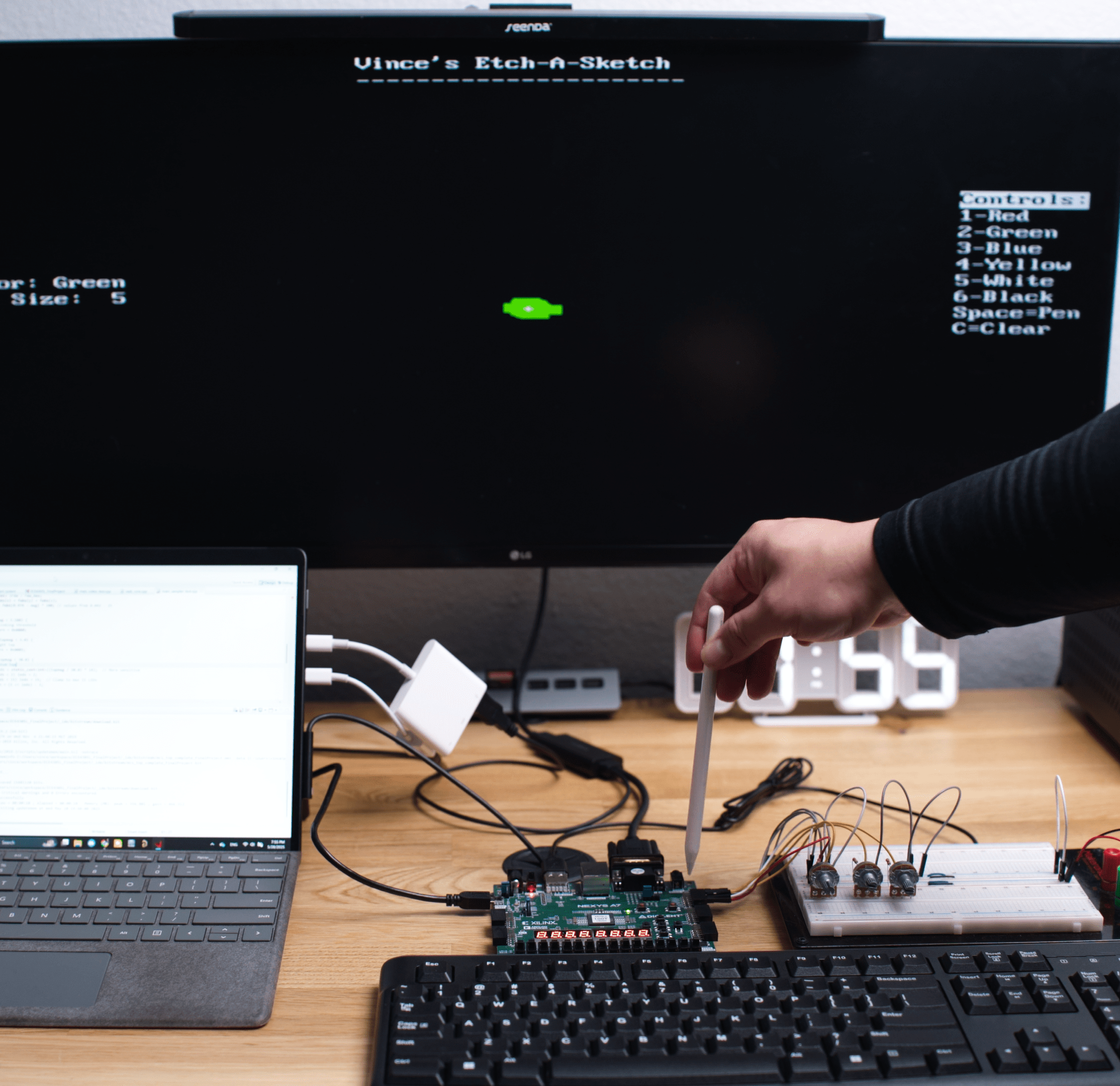
I’ve worked across both firmware and digital design, developing embedded systems using C++ and SystemVerilog. On the software side, I wrote firmware for microcontrollers and custom FPGA peripherals, implementing communication protocols like SPI, UART, and PWM. On the hardware side, I designed and verified SystemVerilog modules for FPGA-based systems, including custom logic for timing control, peripheral interfacing, and real-time data processing. I used Vivado for synthesis and simulation, and Vitis for driver integration and hardware-software testing. These projects deepened my experience in hardware-software co-design, timing analysis, and building reliable systems at the register-transfer level.
Comparative Evaluation of YOLOv12 vs YOLOv11 on the VisDrone Dataset
I collaborated on a comparative evaluation of YOLOv12 and YOLOv11 object detection models using the VisDrone dataset. We trained and tested Nano to XLarge variants for both architectures using Ultralytics' tools on Google Colab, focusing on consistency in training parameters and environment. To measure performance across drone footage conditions, we logged mAP, precision, recall, F1 scores, and per-class AP metrics. I developed a batch evaluation pipeline that generated CSV summaries, confusion matrices, and PR curves to streamline comparison across models. Our goal was to understand architectural trade-offs in accuracy and computational efficiency for deployment in aerial vision systems.
YOLOv5 on Resource-Constrained Systems
I conducted a benchmarking process to evaluate YOLOv5 performance across devices with limited or no discrete GPU acceleration, including the Raspberry Pi 5, Surface Pro 8, and Mac Mini M2 Pro. Using Ultralytics’ training and inference tools, I tested Nano to XLarge model variants, logging inference times, mAP scores, and model sizes to assess deployment trade-offs. I also created a tracking sheet to organize results across platforms. Models were trained and validated on the COCO and VisDrone datasets, with a focus on optimizing performance for edge and low-power environments.